|
WHOA DID YOU JUST SAY ACTUAL CONTENT!?!?!?! Ok, don't get too excited. Yes, I did actual substantive design drawings. As of yet, nothing is dimensioned since I didn't have calipers with me on my eight hour flights to and from Berlin. Without further ado (and please forgive the poor art and handwriting), here are my preliminary designs. 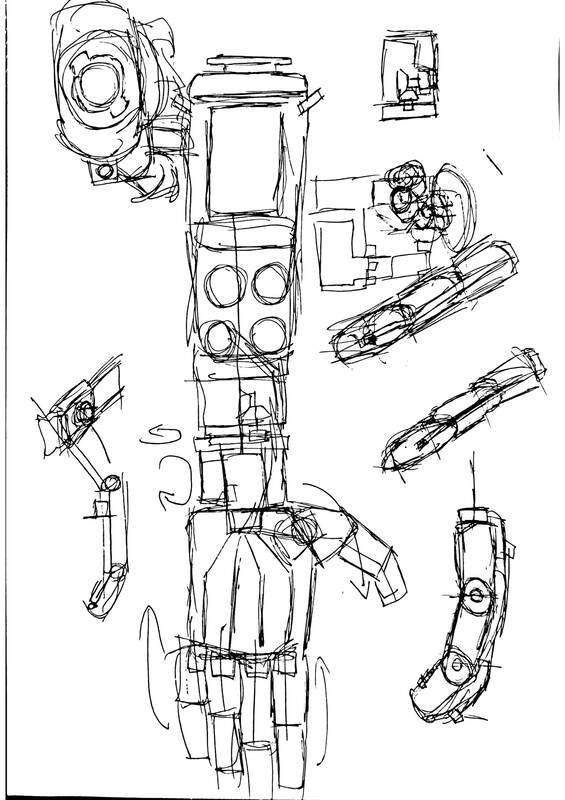 This was my very first (and very rough sketch of what I want the arm to be. The key points to take away are the two position thumb, pan-tilt wrist, and cable drums for spooling our artificial tendons onto. 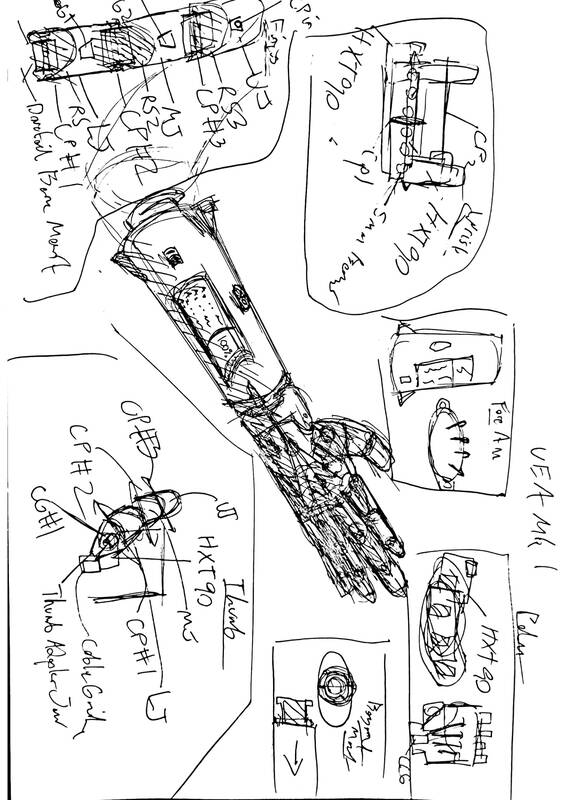 This was my second go around refining that basic layout, and it is currently the mechanical layout I am working from. Big take-aways here are the further elaborated concepts of the fingers, thumb and wrist mount. I frankly dont know how much this could support, but I am shooting for the ability to pick up a 10kg weight using PLA components, so all joints and crosspins either extend all the way through the components in question, or have redundent support. 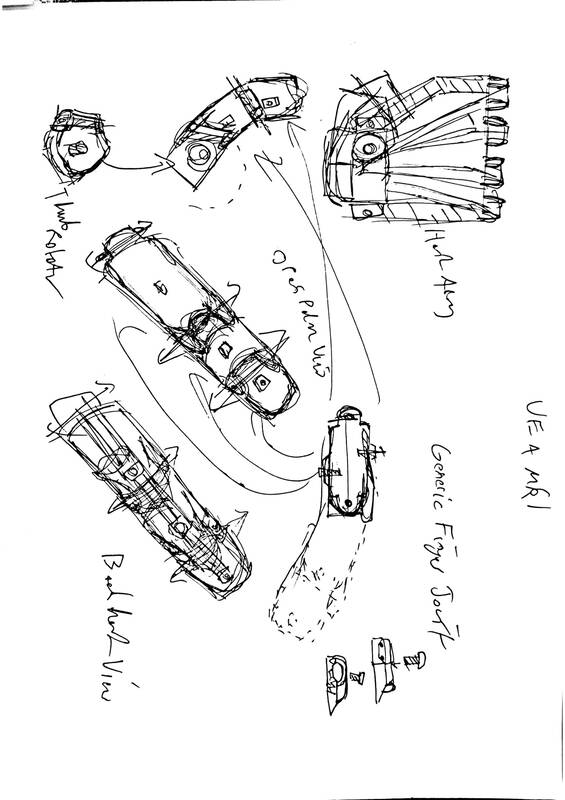 A slightly more detailed look into the fingers, thumbs and hand. The fundamental concept here is to use a series of replaceable and interchangeable joint segments (each of which contains an extension limiter, a clamp for elastics, and a channel for the artificial tendons). The thumb is the same fundamental system as the fingers, but utilizing only 2 of these segments as opposed to 3, and being mounted on an HXT90 servo. The hand has a few pictured cable guides, but not much of note besides that. 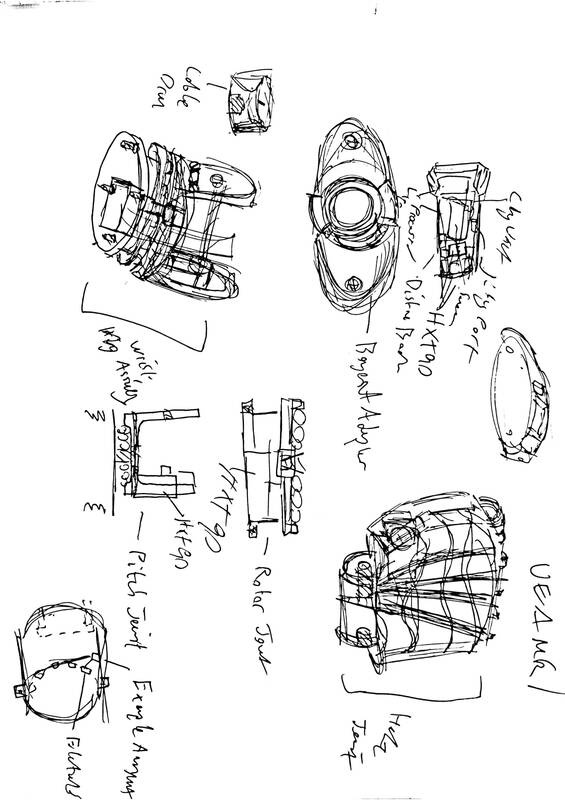 A slightly more in depth look at the custom socket, bayonet mount (interesting name, read the Wikipedia article), the hand, and the wrist pan-tilt unit. 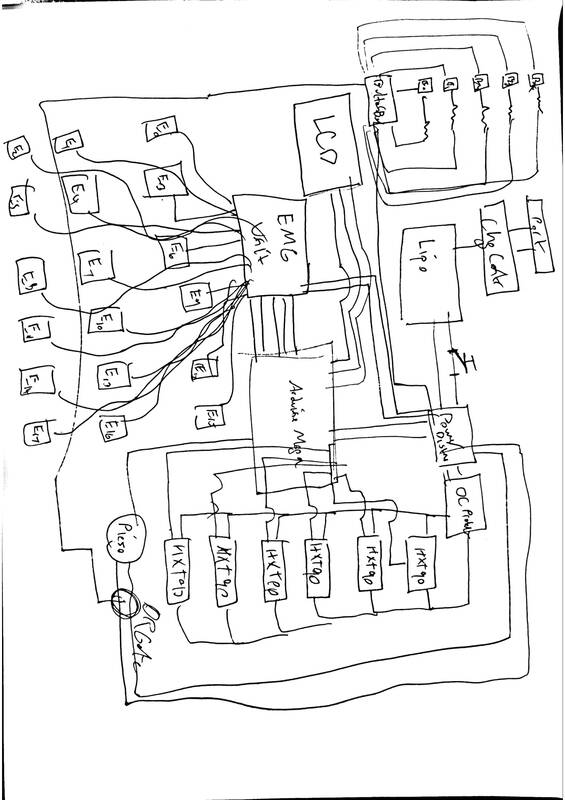 Finally, a very rough, and I do mean VERY rough block diagram. This is roughly what the electronics will be. Effectively, a EMG sensor array will use 3 electrodes per finger (this might be able to be reduced though), this signal is processed by an Arudino and sent into the corresponding servo. This pulls the artificial tendon causing the finger to bend. The servo array pulls its power from a separate distribution board as pulling it straight from the Arduino would cause problems. These are the slightly more in depth exploded views of each part.
As I said, not much. It will of course be on the github in PDF format. Actual CAD to follow.
1 Comment
50 years ago to the minute, the Apollo 11 Lunar Module "Eagle" landed on the surface of the moon. Aboard her rode astronauts "Buzz" Edwin Aldrin and Neil Armstrong, while astronaut Michael Collins watched from 60 miles above.
The three embarked on their journey on July 16th, 1969 - mere months before the late President John F. Kennedy's deadline to "put a man on the moon by the end of the decade." Aboard the Saturn V rocket they climbed first into orbit, along the same path blazed by Yuri Gagarin, Alan Sheppard, John Glenn and the pioneers who first left the clutches of the atmosphere. They screamed at 16,000 miles per hour over the pale blue dot on which all human experience lies. Lighting their engines a third time, they set sail for the moon and began the journey which would cement them in history. We know their story, and we tout this day as mankind's greatest achievement - the day when Mother Earth sent her own children to grace a foreign world. It took over half a million men working tirelessly to build the Saturn V that would carry these three to the moon. Many millions more built the rockets that had preceded it and paved the way for that "small step". Dozens died in the pursuit of space flight, as would dozens more in the 50 years since we first trod on lunar soil. So what is the ultimate message to take away from today? I believe it's a simple one; What has been deemed foolish, has always yet been done. The victories we see as impossible, will regardless, still be won. What Apollo told the world, as they soared through the sky, Was a message to and from all men, "We can do it if we try." Whew, all caught up! Now we are back to modern times. Fun fact about today, exactly 50 years ago, Apollo 11 and the Eagle LM and Columbia CSM departed for the moon. Anyways, back to the arm. This week wasn't exactly riveting design work, but it was critical research.
I'm going to be trying to build a replacement for a human arm, so I should get to know the general anatomy of the arm a little bit better. So far, I've been reading through a myriad of anatomy textbooks and 3D models of the human skeleton. A interesting resource I didn't think to check (until my sister suggested it) which has in fact, been surprisingly helpful has been figure drawing books. My favorite so far of this collection has been Figure Drawing For All It's Worth by Andrew Loomis. While the process of modelling and drawing a hand are entirely different (mainly because you can rely on measurements to thousandths of inches, therefor you don't have to work from general to specific as you would when drawing, It has greatly aided in my preliminary sketches of the arm. Slowly I'm approaching a "final" pre-CAD design. I'll elaborate a bit... -The arm will use 5x 9 gram PWM servo motors to control bend of each individual finger with and additional 2x servo motors being used to control the 2D positioning of the thumb. -20lb fishing line and or kevlar thread will serve as the tendons of the hand. -Elastics will be stretched along the back of each finger through a series of braces to return each digit to an extended position when so controls are applied. -Rotation and flex of the wrist and will be provided 2x high torque servo motors mounted in a standard gimbal assembly. -XT-60 and 3 wire communications connectors will be used to transfer all relevant control information from the forearm to the hand. -The forearm will include a 2700 mAh 3S LiPo battery and integrated discharge protection circuit as well as the micro controller which will be interpreting and processing signals. -A standard "bayonet" type mount will secure the arm to the socket. below the elbow. Lots of boring words that don't mean much without some drawings to demonstrate them. I'll be working on those on my two 8-hour plane trips in the next week. |
AuthorMy name is James Falcon Doss. I'm a member of Severn School's class of 2020 and have a passion for all forms of engineering. Archives
May 2020
Categories |
 RSS Feed
RSS Feed
